温州坤格自动化科技有限公司 伺服电机|机械手|PLC|视觉检测
18606676312

2024-11-08 00:20:21
伺服电机的扭力控制可以通过以下几种方式实现:1.电流控制:通过控制伺服电机的电流大小来实现扭力控制。可以根据需要调整电流的大小,从而控制电机输出的扭力。2.位置控制:通过控制伺服电机的位置来实现扭力控制。可以根据需要调整电机的位置,从而控制电机输出的扭力。3.速度控制:通过控制伺服电机的速度来实现扭力控制。可以根据需要调整电机的速度,从而控制电机输出的扭力。4.力矩控制:通过控制伺服电机的力矩来实现扭力控制。可以根据需要调整电机的力矩大小,从而控制电机输出的扭力。以上是常见的几种伺服电机扭力控制的方法,具体选择哪种方法取决于实际应用的需求和控制系统的设计。伺服电机,就选温州坤格自动化科技有限公司,让您满意,期待您的光临!温州飞剪电机哪家好

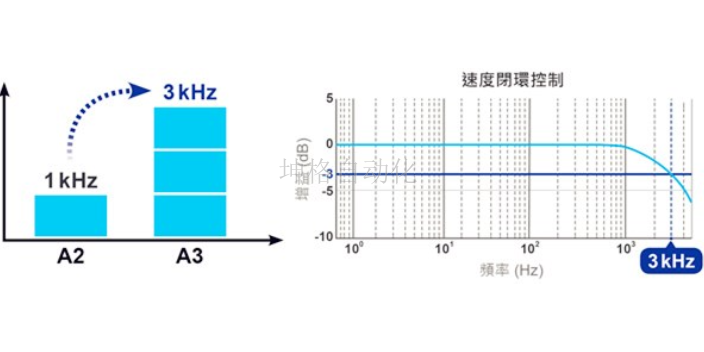
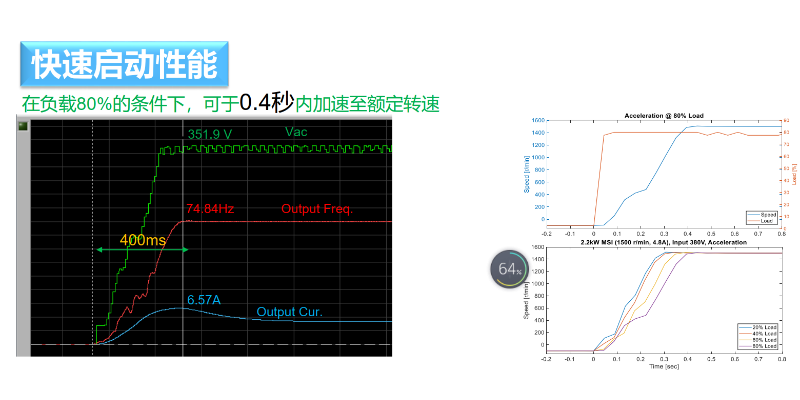
伺服电机与步进电机速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能较好,以三洋400W交流伺服电机为例,从静止加速到其额定转速3000RPM只需几毫秒,可用于要求快速启停的控制场合。综上所述,交流伺服系统在许多性能方面都优于步进电机。但在一些要求不高的场合也经常用步进电机来做执行电动机。所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机。龙湾区液压伺服电机温州坤格自动化科技有限公司是一家专业提供伺服电机的公司,有想法的可以来电咨询!

伺服电机过载报警的常见原因有以下几种:机械负载过大或工作环境过热导致电机温度上升。电源电压不稳定或电缆接触不良导致电机输出功率下降。机械负载系统或传感器故障导致电机输出功率异常。伺服电机本身故障,如绕组过热等。伺服驱动器故障,如控制器损坏等。针对以上原因导致的伺服电机过载问题,可以采取以下措施解决:降低负载,改善工作环境。检查电源和电缆连接情况,保证稳定输出。检查机械负载系统及传感器是否正常,修复或更换故障部件。检查电机绕组是否过热并维修,同时检查控制系统是否正常工作,如控制器是否损坏等。需要注意的是,伺服电机的过载能力较强,一般在额定转矩的三倍左右,因此,在电机出现过载报警时,首先需要排除机械负载方面的问题,再考虑电气方面的原因。
台达简介:台达成立于1971年,为全球提供电源管理及工业自动化解决方案。业务运营多面涵盖研发、生产、销售与服务。截至2022年底,共设有广东东莞、江苏吴江、安徽芜湖、湖南郴州四个主要生产基地;30多处研发中心与实验室,超2,300名研发工程师,68个运营网点,员工总数超4万人。凭借创新技术、持续强化工程研发设备与精良测试仪器,台达持续推出高效、节能、可靠的产品与解决方案。台达子公司中达电通也深入了解客户运营环境及各行业的工艺需求,为客户提出完整解决方案、提升竞争优势。为满足客户不间断运营的需求,台达也积极参与并赞助各类社会公益活动,范围涵盖环境教育、绿色建筑推广、人才培育、学术研发等。台达以持续行动为社会与环境所做出的具体贡献屡获肯定,包括连续12年入选道琼斯可持续发展指数之“世界指数”;于2020与2022年CDP全球环境信息研究中心年度评比荣获“气候变化”与“水安全管理”双“A”评级,连续8年获得社科院《企业社会责任蓝皮书》外企10强殊荣等。伺服电机,就选温州坤格自动化科技有限公司,用户的信赖之选,有想法可以来我司咨询!

线:编码器光电码盘的一周刻线,增量式码盘刻线可以10线、100线、2500线的刻线,只要你码盘能刻得下,可任意选数;断电保持型码盘其码盘刻线因格雷码的编排方式,决定其基本是2的幂次方线,如256线、1024线、8192线等。位:2的n次方,由于断电保持型码盘常常是2的幂次方线输出,所以,大部分的断电保持型码盘是以“位”来表达,但断电保持型码盘也有特别的格雷余码输出的,如360线、720线、3600线等。增量值编码器也有用位来表示的,如15位、17位,其是通过内部细分,将计算的线数倍增后,一般大于10000线了,就用“位”来表达。分辨率:编码器可以分辨的角度,对于一般计算,以360度/刻线数计算,目前大部分就直接用多少线来表达了。但这样就有一些概念的混淆,如增量值编码器,如用上A/B两相的四倍频,2500线的,分辨率实际可以是360/10000的,如果内部细分计算的“线”可以更多,达到15位、17位的,所以,常常增量编码器用“线”来表达的,意义是还没有倍频细分,用“位”来表达的,是已经细分过的了。温州坤格自动化科技有限公司是一家专业提供伺服电机的公司,欢迎您的来电!龙港市水泵伺服电机
伺服电机,就选温州坤格自动化科技有限公司,有需求可以来电咨询!温州飞剪电机哪家好
而惯量描述的是物体运动的惯性,转动惯量是物体绕轴转动惯性的度量。转动惯量只跟转动半径和物体质量有关。一般负载惯量超过电机转子惯量的10倍,可以认为惯量较大。导轨和丝杠的转动惯量对伺服电机传动系统的刚性影响很大,固定增益下,转动惯量越大,刚性越大,越易引起电机抖动;转动惯量越小,刚性越小,电机越不易抖动。可通过更换较小直径的导轨和丝杆减小转动惯量从而减小负载惯量来达到电机不抖动。我们知道通常在伺服系统选型时,除考虑电机的扭矩和额定速度等等参数外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机。在调试时(手动模式下),正确设定惯量比参数是充分发挥机械及伺服系统效能的前提。那到底什么是“惯量匹配”呢?其实也不难理解,根据牛二定律:进给系统所需力矩=系统转动惯量J×角加速度θ角加速度θ影响系统的动态特性,θ越小则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。如果θ变化,则系统反应将忽快忽慢,影响加工精度。伺服电机选定后极限大输出值不变,如果希望θ的变化小,则J就应该尽量小。温州飞剪电机哪家好